Tras la llegada de telefonos moviles con tecnologia touch, la mayoria de estos telefonos comenzaron a implementar sensores que permiten al celular conocer medidas como la posicion, velocidad de movimiento, orientacion y otras caracteristicas del mundo que nos rodea.
¿Qué es un sensor?
Si bien existen variadas definiciones respecto a qué es un sensor, wikipedia nos entrega una definicion bastante completa.
Un sensor es un dispositivo capaz de detectar magnitudes físicas o químicas, llamadas variables de instrumentación, y transformarlas en variables eléctricas. Las variables de instrumentación pueden ser por ejemplo: temperatura, intensidad lumínica, distancia, aceleración, inclinación, desplazamiento, presión, fuerza, torsión, humedad, movimiento, pH, etc. Una magnitud eléctrica puede ser una resistencia eléctrica (como en unaRTD), una capacidad eléctrica (como en un sensor de humedad), una Tensión eléctrica (como en un termopar), una corriente eléctrica (como en unfototransistor), etc.
Algunos de los sensores mas importantes y que estan presentes en la mayoria de los telefonos moviles son:
- GPS
- Acelerometro
- Sensor de proximidad
A continuación se presenta en detalle cada uno de estos sensores.
GPS (Global Positioning System)
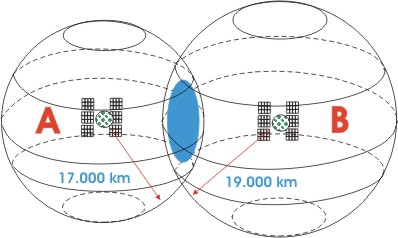
El GPS permite determinar a escala mundial la posición de un objeto, una persona, un vehiculo o un avion en tiempo real. Que los telefonos moviles incorporen GPS significa que puedes obtener tu propia posicion y determinar por ejemplo una ruta y monitorearla en todo momento para ver si vas por buen camino.
El GPS funciona por medio de una red de satelites que estan enviando señales de forma permanente. Esta señales pueden ser captadas por un receptor incluidos en la mayoria de los telefonos moviles, el cual se encarga de conocer tu posicion en todo momento.
A pesar de que un telefono movil por si solo ( sin GPS) es capaz de proveer información acerca de tu localización mediante medidas de tu señal como:
- El angulo de aproximacion a las torres en las celdas
- el tiempo que tarda la señal en viajar a multiples torres
- la potencia de tu señal cuando llega a una torre
Conceptos básicos de un receptor GPS
Un receptor GPS delega en ondas de radio, pero en lugar de usar torres que están puestas en el suelo, comunica con satélites que orbitan la tierra. Actualmente existen unos 28 satélites GPS en órbita (24 trabajando y 4 de reserva en caso de que falle alguno) a una distancia de 20.200 KM aproximadamente que permite cubrir prácticamente toda la superficie de la tierra.
Para determinar tu localización, un receptor GPS debe conocer:
- La localización de al menos tres satélites por encima de ti.
- Dónde estas en relación con los satélites.
El GPS no esta exento de problemas, ya que en la practica los bosques o centros urbanos puede provocar problemas en hacer una buena localización.
Arquitectura del GPS en un celular.
Si bien es dificil dar con esta informacion en celulares modernos, me imagino que la implementacion en celulares un poco mas antiguos es la base del funcionamiento del GPS en los dispositivos moviles modernos.
La arquitectura básica de un GPS dentro de un celular es la siguiente

Un teléfono celular que posee el sistema GPS, puede recibir la señal satelital de 1575,42 MGz por medio de una antena planar para GPS interna PIFA ( Planar Inverted F Antenna) o mediante una antenna externa.
La señal que recepciona la antena planar PIFA pasa a traves del filtro FL6055 y del amplificador lineal de bajo ruido (LNA) U6051. Posteriormente la señal ingresa al filtro LNA 6050 a traves del filtro FL6055, esta señal señal que ingresa al integrando U6050 es una señal de tipo DSS (Direct Sequence Spread Spectrum o en español, Señal de Secuencia directa de espectro extendido ) es de 1575,42MHz esta señal DSS se aplica en un circuito mezclador de rechazo de señal imagen, en el mezclador esta señal se mezcla con la señal que proviene de un oscilador local con el fin de producir una señal de frecuencia intermedi FI de 9,45MHz, luego la señal de salida del FI es amplificada y filtrada para ser enviada a una etapa amplificadora con control automatico de ganancia (AGC) antes de ser aplicada a un conversor A/D (Analogico - Digital).
Explicación de algunos circuitos de la imagen
EL circuito AGC provee a la señal FI la ganancia optima para que pueda ser enviada al conversor A/D de 2 bits. Así el conversor A/D proveerá bits con la amplitud necesaria para ser aplicados al Bloque de Interfase ( Inteface Block). Las salidas de este bloque provee de señales de reloj y datos de 2 bit al procesador GPS U6000
RTC es un circuito de reloj de baja potencia pero de mucha presicion ( 32Khz) que proviene del PCAP. Este circuito es alimentado por VDDRTC con el fin de mantener una maxima duracion de la bateria.
GPS_WAKEUP* es una señal del POG utilizada para despertar al cliente SiR_FLoc del modo Sleep que es el modo de bajo consumo que se activa cuando no se utilizando el GPS.
Usos más comunes de los teléfonos con GPS
Guía de orientación – Los teléfonos móviles GPS, funcionan prácticamente de la misma forma que un GPS tradicional, esto es, tiene la capacidad de mostrar por pantalla el camino exacto de un sitio a otro en tiempo real, y al mismo tiempo usar el servicio de voz para indicarnos los detalles de nuestra ruta. Por lo general una base de datos contiene los mapas, que son actualizados en forma constante.
Localizador – Localizador o rastreador lo utilizan por lo general algunos empresarios para hacerle seguimiento a sus empleados mediante el celular de la empresa y por otro lado otro uso que va ganando campo es el seguimiento que hacen los padres de sus hijos, los padres quieren saber en todo momento donde están sus hijos, ya que en muchos países existen altos indices de personas perdidas (sobre todo hijos que son raptados) por esta razón es importante el uso de un localizador para los padres.
Acelerometro
El acelerometro es un instrumento utilizado para medir la aceleracion y las fuerzas inducidas por la gravedad, es decir que con un telefono movil podemos detectar su movimiento y su giro

Acelerometro
Este pequeño componente es capaz de detectar cambios en la orientacion avisando de esta manera a la pantalla que debe rotar, asegurándose de esta manera que la imagen de la pantalla este siempre bien ubicada para nosotros.
En la actualidad la mayor parte de los teléfonos móviles ( por no decir todos) cuentan con este sensor, casi indispensable en teléfonos de gama media y alta.
Bill Hammack profesor de la universidad de Illinois explica los conceptos básicos detrás de los 3 ejes X,Y y Z.
Basados en el video de bill Hammack explicando el funcionamiento de un acelerometro podemos decir lo siguiente:
Los acelerometros constan de dos partes fundamentales: Una base o cubierta unido al objeto del que queremos medir la aceleracion y una masa que aun estando unida a la base, puede moverse

Como podemos ver en la imagen hay un resorte con una pesada bola de metal, si se mueve la base hacia arriba la bola se queda atras estirando el resorte. Si medimos la distancia que el resorte se estira podemos calcular la fuerza de gravedad. De esta manera tres de estos dispositivos podrian determinar la horientacion de un objeto tridimensional.

Si un objeto se encuentra acostado sobre el eje Z perpendicular a la gravedad, la bola en el eje X muestra extension. Rotamos el objeto para que el eje Z apunte hacia arriba y solo el acelerometro en direccion del resorte de este eje se estira.

Entonces la pregunta es: ¿Como es que el telefono y el chip del acelerometro miden los cambios en la gravedad?
Obviamente es de una manera mas compleja que una simple bola y un resorte, sin embargo esta analogia es la base de como funciona el chip en su interior.
Dentro del chip hay un pequeño acelerometro hecho de silicio. este chip cuenta con una base que es unida al telefono y una seccion parecida a un peine que se mueve adelante y atrás.

Ese peine ( en la imagen la estructura celeste) o masa sismica es el equivalente a la bola, donde el resorte en este caso es la flexibilidad del delgado silicio unido a la base, de esta manera si medimos el movimiento en esta seccion central podemos detectar cambios de orientación.
Pero, ¿Como se lleva a cabo todo esto?
Para saber como se lleva a cabo todo esto es necesario analizar las tres cerdas en el acelerometro.
Las tres imagenes indican el moviento de las cerdas

Las tres cerdas ( dos verdes y una celeste) forman un capacitor diferencial, esto significa que si la sección central se mueve existirá un flujo de corriente, de esta manera se relaciona la cantidad de flujo de corriente con la aceleración.
Aplicaciones del acelerometro
Lo podemos ver en diversas aplicaciones como por ejemplo en la interfaz de usuario, donde la poner el telefono en forma horizontal la imagen cambia adaptandose al formato vertical, de la misma manera al voltear el telefono en forma vertical la imagen vuelve a posicionarse en su estado original.


Super Monkey Ball

Asphalt 5
Sensor de proximidad
Un sensor de proximidad es un transductor ( osea, convierte un determinado tipo de energía de entrada, en otra diferente a la salida) que detecta objetos o señales que se encuentran cerca del sensor.
Existen varios tipos de sensores de proximidad, esto según el principio físico que utilizan. De esta manera podemos nombrar los sensores de proximidad mas comunes que son:
- sensor capacitivo
- sensor inductivo
- Sensor fin de carrera
- Sensor ultrasonico
- Sensor magnetico
- Sensor infrarojo
Sin embargo es este ultimo (sensor infrarojo) el que utilizan en la mayor parte de los telefonos moviles y es por esa razon que solo nos enfocaremos en el.
Sensor infrarojo
El receptor de rayos infrarojos es por lo general un fototransistor o un fotodiodo. El circuito de salida utiliza la señal del receptor para amplificarla y de esta manera adaptarla a una salida que el sistema sea capaz de entender.

Básicamente este sensor funciona de la siguiente manera. Se genera una ráfaga de señales luminosas infrarrojas las cuales al rebotar contra un objeto se reciben por otro componente del circuito, el fototransistor. El ser recibidas significa que el sistema detecta proximidad con lo que el led de salida se acciona, es decir, brilla.

Circuito de un sensor de proximidad infrarrojo.
Aplicaciones del sensor de Proximidad
La aplicación mas utiliza de este sensor es cuando hacemos una llamada. Al hacer una llamada nos acercamos el teléfono al oído, de esta manera el sensor de proximidad se activa para deshabilitar la pantalla touch con el fin de que no se presionen botones a lo loco cuando estemos hablando.
Otras aplicaciones sirven por ejemplo para bloquear el teléfono pasando la mano por encima, y también las hay para contestar llamadas con solo acercar el teléfono al oído. Aplicaciones hay varias y por lo general podemos encontrar una gran lista en GooglePlay que es la tienda de aplicaciones para dispositivos con sistemas operativos Android.






